


The actuator subsystem consists of the individual ∼80 actuators (one for each muscle). Each actuator, in turn, consists of a screw driver motor, a gearbox, a spindle, a piece of kiteline as tendon and an elastic component represented by shock cord
|
Motor, Gearbox, and Spindle Typical screw driver motors are used for the actuators. They are designed to produce torques of around 3Nm from NiCad battery packs of 6V nominal voltage, and the direction of rotation is electrically switchable; backdriving against the set direction is prevented by a sprag clutch. In the future, other types of motors, e.g. from model making will be tested as well. |
 Figure: Screwdriver with gearbox, and spindle used for the actuators. |
|
Dyneema Kiteline Dyneema kiteline, also known as Spectra, is a heavy molecular weight polyethylene (HMWPE). With a working breaking strain of 250kg it is 40% stronger than Kevlar. |
 Figure: Dyneema kiteline - 40% stronger than Kevlar |
|
Shock Cord The elastic component of the actuators is provided by marine grade shock cord - a sleeved natural rubber core available in a number of thicknesses. |
 Figure: Shock cord used for the elastic components of the actuators |
Actuator working principle
The actuator working principle is very simple: by winding the kiteline around the spindle the “muscle” can be either “innvervated” or “relaxed”, depending on the direction of rotation of the motor (see following figure).
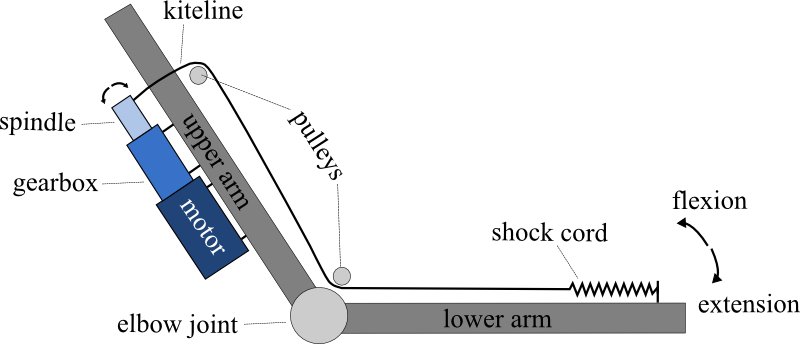
Figure: Schematic illustration of an actuator using the example of the Musculus biceps brachii.

