


The behavioral subsystem consists of (1) a voluntary movement control unit, (2) an involuntary movement control unit, (3) ECCEOS — the physics based simulation of the robot, and (4) a cognitive functions unit (see following figure). The individual units will be briefly described in the following sections.
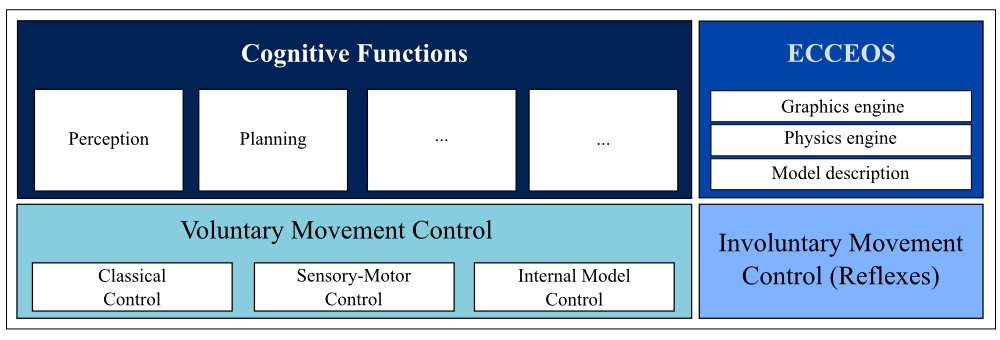
Voluntary movement control unit
For voluntary movement control, three different control approaches are developed and integrated into a single hybrid architecture so that the best suitable control strategy can be selected for different tasks. These three control strategies are: (1) classical control, (2) sensory-motor control, and (3) internal model control.
Involuntary movement control unit (reflexes)
Even though reflexes are not voluntarily controlled they are part of the global behavior. In general, a reflex requires the actuation of more than one muscle (i.e. agonist and antagonist) and hence, the reflex control system can not be implemented on the single actuator level. One reflex that is planned to be implemented is the vestibulo-ocular reflex. Another group of reflexes that might be important in the course of the project are withdrawal reflexes that could be triggered, for instance, in the case of accidental touch.
ECCEOS
ECCEOS, the physics-based computer model of the robot, serves multiple purposes. It is used as a demonstration and development platform for all controllers as well as an internal model for motion planning and for error monitoring during execution. The three main components of the simulator are: (1) a physical and graphical model description, (2) a physics engine (required for collision detection, simulation of the actuator dynamics, etc.) and (3) a graphics engine (for visual feedback and interaction with the simulated scene).
Cognitive functions unit
The cognitive functions unit is what shapes the behavior of the robot. It consists of a perception unit, planning unit, decision making unit, etc.

