


The sensor subsystem consists of a proprioceptive, visual, audio & vibration, inertial, and tactile unit which will all be briefly explained in the following sections (see following Figure).
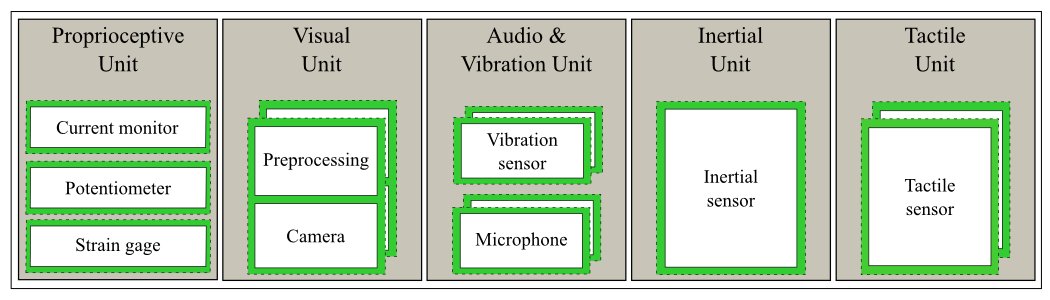
Proprioception unit
Proprioception, the sense of the relative position of neighbouring parts of the body, is fundamental for well-controlled movements and interactions with the environment. Typically, high-precision actuators are used in robots which make the determination of the relative positions rather simple. In ECCEROBOT, however, compliant actuators are employed and additional sensors for measuring the spindle position (muscle length) and kiteline strain (muscle force) of the actuators need to be incorporated. Hence, to have a good tradeoff between precision, cost, and error tolerance, three types of sensors will be used in parallel for each muscle: strain gages and current monitors for the kiteline strain and potentiometers for the spindle position.
Visual unit
Similar to the human model, the robot will be equipped with two “eyes” represented by two high-speed, high-definition cameras. However, image processing puts high demands on the processing unit, especially if real-time requirements have to be considered. Hence, to ensure fast processing of the high-resolution images and to enable low-bandwidth communication with the main computer, the cameras will be augmented with field programmable gate arrays (FPGAs) for efficient image preprocessing.
Audio & Vibration unit
To make, for instance, voice commands possible, the robot will be equipped with an audio system consisting of two microphones that mimic the acoustical and directional characteristics of the human ears. In practice, however, vibration and impact sensing may be more important which is why MEMS accelerometers will be placed in strategic locations around the body.
Inertial unit
Efficieny of the image processing of the visual unit strongly depends on the stability of the perceived images. Imagine a human that shakes his head while reading a book. Due to the vestibulo-ocular reflex he would still be able to read the text. If he, however, would move the book with the same speed, he would not longer be able to read the text as visual processing (which is much slower than vestibular processing) would be the only way to compensate for the movement. Hence, an inertial measurement unit will be included in the head of the robot to simplify image processing by enabling an equivalent to the vestibulo-ocular reflex.
Tactile unit
For manipulation and grasping tasks, sensory feedback from tactile sensors is indispensable. Hence, force-sensitive-resistors and/or matrices will be placed in the fingertips and in the palms of the robot’s hand.

